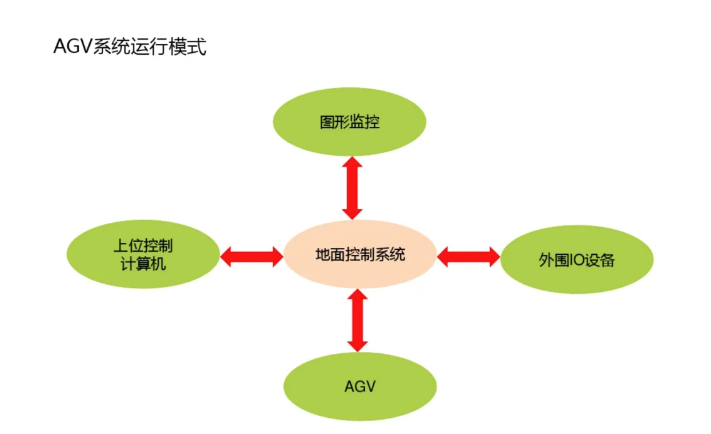
AGV係統(tǒng)運行模式
a)AGV地麵控製係統接受上位控製計(jì)算機發出的任務啟動命令後,啟動相應的物料搬運任務。
b)車輛管理根(gēn)據AGV的任務執行情況調度AGV執行任(rèn)務,並通過無線(xiàn)電將命令發送到AGV。
c)AGV隨時報告車輛位置(zhì)、狀態信息及任務執行信息。
d)交通管理根據各AGV的位置,確認每一輛AGV下一(yī)步應該走的路徑(jìng)。
e)任務管理根據AGV任務(wù)執行信息報告上位控製計算機。
地麵控製係統在必要(yào)時使用輸入輸(shū)出模(mó)塊控製外圍設備,如通過數字(zì)I0塊啟動(dòng)或停止充電站。
地(dì)麵控製係統把各種AGV係統的運行狀態發送給圖形監控係統,圖形監控(kòng)係統(tǒng)使用這些(xiē)運(yùn)行狀態構建各(gè)種監控界麵,供係(xì)統維護人員監控係統。